
Die Gruppe „Aktives Sehen“ des Instituts für Computervisualistik um Prof. Dr.-Ing. Dietrich Paulus entwickelt seit 2003 Robotertechnik und belegte mit ihren Entwicklungen schon mehrfach bei der RoboCup-Weltmeisterschaft vordere Plätze. Seit 2012 arbeiten die Forscher nicht mehr an Rettungsrobotern, sondern fokussieren sich auf Service-Robotik.
Sperrholzplatten, Werkzeugkästen, Maschinenlager – die Roboterhalle auf dem Bundeswehrgelände an der Bundesstraße nahe des Campus Koblenz erweckt den Eindruck, als habe hier ein Tüftelfan den Hobbykeller seiner Träume eingerichtet: Hindernis-Parcours aus Holzplatten ziehen sich hier durch die mehr als hundert Quadratmeter große Halle, in der die Gruppe „Aktives Sehen“ um Prof. Dr. Dietich Paulus, Leiter der Gruppe vom Institut für Computervisualistik, neben anderen Instituten und Unternehmen neue Robotertechnik testet und weiterentwickelt. Der Arbeitsraum wird den Forschern und Mitarbeitern des Instituts kostenlos von der Bundeswehr zur Verfügung gestellt. Einige der Entwicklungen entstehen sogar in Kooperation mit der Bundeswehr und sollen bei humanitären Einsätzen und Katastrophenfällen von ihr erprobt und eingesetzt werden dürfen.
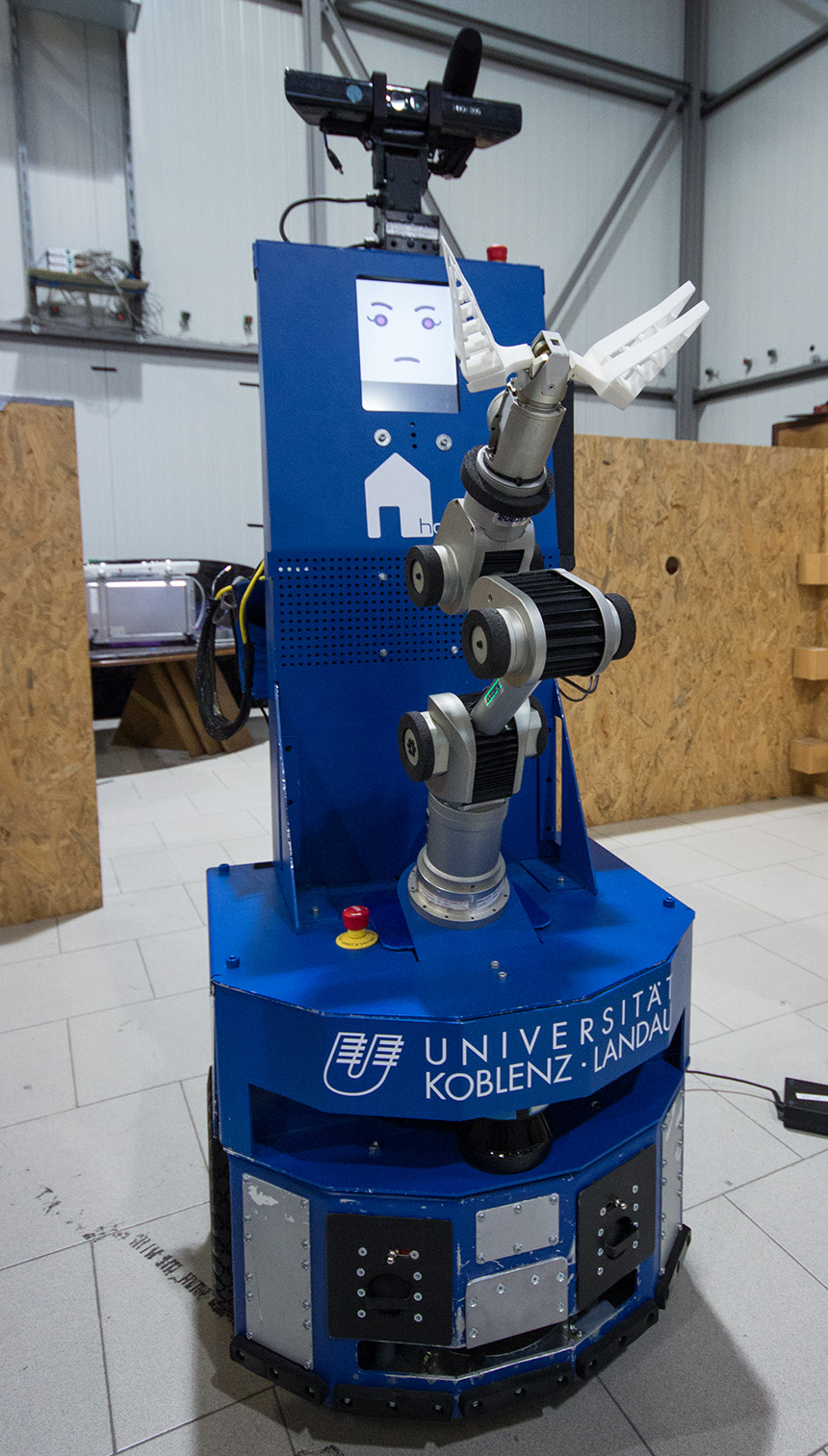
Serviceroboter Lisa soll Menschen im Haushalt unterstützen.
Service-Robotik steht im Mittelpunkt
Seit 2012 haben sich Paulus und die Arbeitsgruppe „Aktives Sehen“ auf die Weiterentwicklung serviceorientierter Roboter wie Lisa fokussiert. Die Arbeit an Bergungs- und Rettungsroboter Robbie haben die Forscher dagegen eingestellt. „Robbie wurde geschlachtet“, erzählt Paulus mit einem Augenzwinkern. „Damit wir bei seiner Weiterentwicklung in der ersten Liga mitspielen können, benötigen wir mehr Know-How und Technik aus dem Bereich der Mechatronik. Außerdem beschäftigen wir uns mit Bilderkennung- und verarbeitung. Wir wollen letztlich Rechnern das Sehen beibringen. Die Entwicklung an einem Bergungsroboter bringt uns da leider nicht weiter“, erklärt der Leiter der Gruppe. Zudem sei es schwieriger, Entwicklungsmittel für Rettungsrobotik einzuwerben, da das öffentliche Interesse daran generell eher gering sei, berichtet Paulus. Nach der 23. Entwicklungsgeneration musste Robbie demnach das Zeitliche segnen.
Die Serie
 Was gibt es Neues in der Wissenschaft? Wir stellen Personen und Projekte vor, die im Dienst der Universität Koblenz-Landau die Forschung voranbringen.
Was gibt es Neues in der Wissenschaft? Wir stellen Personen und Projekte vor, die im Dienst der Universität Koblenz-Landau die Forschung voranbringen.
Lisa befindet sich nun in der 6. Generation und wird kontinuierlich von Studententeams unter der Leitung von Viktor Seib, Doktorand am Institut für Computervisualistik und Mitarbeiter der Gruppe „Aktives Sehen“, erprobt und weiterentwickelt. Der Look des Roboters wurde dabei gemeinsam mit Designspezialisten der HWK entworfen, zudem wurde vor kurzem eine neue fahrbare Alu-Plattform an Lisa angebracht. Als Serviceroboter konzentrieren sich ihre Fähigkeiten auf sogenannte Hol- und Bringaufgaben von Gegenständen. Dazu ist sie im Rumpf mit einem mehrgliedrigen Greifarm ausgestattet, der sich nach dem gewünschten Objekt ausstrecken kann. Die Aufforderung zu einer Handlung erfolgt dabei durch Spracherkennung über ein Mikrofon. Bei der Ausführung der Handlung orientiert sich Lisa mit einem integrierten Laserscanner im Raum und bewertet ihre Umgebung, um anschließend den gewünschten Gegenstand identifizieren zu können. Seit Neuestem hat Lisa sogar ein Gesicht und kann über ein Display am Kopf ihre Emotionen und Stimmungslage anzeigen.
Für diesen Anwendungsbereich des Roboters gibt es bereits schon Interesse aus der Industrie, erzählt Paulus: „Eine Firma benötigt einen Roboter, der Werkzeuge von einem Regal in eine Bearbeitungsmaschine ablegt und sie von dort wieder zurückbringt. Für dieses Projekt befinden wir uns im Gespräch mit der Firma und klären gerade grundsätzliche Fragen“, berichtet der Bildverarbeitungsexperte.

Seit Neuestem hat Lisa auch ein Gesicht und kann ihre Stimmungslage deutlich machen.
Lisa punktet beim RoboCup – dennoch gibt es Entwicklungspotential
Mit ihren Fähigkeiten konnte Lisa bereits mehrfach die Jury der Weltmeisterschaft des RoboCup, eine Initiative mit dem Ziel, die Weiterentwicklung intelligenter Roboter durch die Veranstaltung von Wettbewerben zu fördern, beeindrucken. So gewann sie bereits den „Innovation Award“ bei der RoboCup Weltmeisterschaft 2010 und den „Technical Challenge Award“ beim RoboCup 2012 in Mexiko-Stadt. Allerdings sind solche Erfolge keineswegs selbstverständlich, weiß Seib, denn die Teilnahme an so einer Meisterschaft ist wegen der hohen Kosten oft abhängig von Sponsorengeldern. „Neben den Flugkosten für die Studententeams und die Betreuer ist auch der Transport für unseren Roboter enorm aufwändig und teuer.“
Indes wird eifrig weiter an Lisa geschraubt und geforscht, denn ihre Schöpfer sind noch längst nicht mit allen Entwicklungsschritten zufrieden. Vor allem bei der ordnungsgemäßen Befehlsausführung und Spracherkennung hakt es noch, beanstandet Seib. „Beim Robocup gibt es sehr viele laute Umgebungsgeräusche, daher sollte Lisa Sprachbefehle künftig noch besser umsetzen können. Darüber hinaus wäre es schön, wenn Lisa als Serviceroboter noch einen zweiten Arm hätte, da eine Haushaltsumgebung nun einmal durchweg für Menschen mit zwei Armen konzipiert ist. Zu guter Letzt sollte sie immer sofort erkennen können, wo sich im Raum Menschen befinden, ohne anhalten und sich umschauen zu müssen. Das führt leider oft noch dazu, dass Lisa Menschen mit Gegenständen verwechselt.“
Vor allem Studierende des Instituts unterstützen die Experten praktisch bei der Verbesserung der Roboterleistungen: „Studierende können bei uns im Rahmen eines Praktikums in Teams an Lisa mitentwickeln, wir stehen dabei als Betreuer zur Seite“, so Paulus. „Jeder kann dabei seine eigenen Qualitäten, beispielsweise als Programmierer oder Projektmanager einbringen. Für die Studierenden sind das wertvolle praktische Erfahrungen.“
Sandra Erber